Larry had returned to Alaska also, so when I got back to Dauntless on the 24th. I’d be taking her the last 400 miles of this 2000+ mile trip to Vallejo on my own. I had a plane ticket to leave Sacramento on 3 July to Austin.
Assuming I had to arrive on the 2nd, I had 8 days to get to Vallejo. Ray, one of my boat mates in the new marina had kindly offered to give me a ride to the airport at 0h dark-30, so, I was back on the clock.
The first leg was critical, 70 nm to Point Conception. Winds had been light or southerly for two days, while I was in Salt Lake City, now, my day of departure, Monday they were forecast to increase from the west as the day progressed. (This is the way I use weather forecasts, looking at the trend, but not necessarily believing the specifics). 70 miles is 12 hours steaming time. I wanted to get around Point Conception before 16:00, otherwise as winds picked up on the bow, we would go slower and slower and I would become ever more miserable, yet again.
Therefore, I planned my departure from Kyoko’s dock at 04:00.
I never sleep well before embarking on any kind of trip, be it, by plane, train, automobile or boat. Thus, I was up just after 3 and figured I may as well get this show on the road.
I have a standard departure procedure. One that I adhere to since pulling away from the dock in the Chesapeake, 4 years ago, only to have the engine stop two minutes later from no fuel. At that time, I dropped the anchor in emergency mode (pulling the chain out of the wildcat and letting the anchor freefall) to stop our drift into nearby boats. Once that was done, I headed to the engine room to see what happened. A quick glance showed both fuel tank feeds were closed. Since I had just opened one, it was clear to me that in my mindset to “open” a closed valve, I had closed the one that was open. So much for check lists.

Way back then, I still did not have my auxiliary fuel pump installed, so of course it took 10 minutes of lift pump masturbation to get the air out and everyone happy again.
Consequently, I follow a standard start up routine, which consists of:
- Engine room check, smelling and looking for obvious leaks and confirming fuel feed and Racor use.
- Engine start
- Turn on breakers for:
- Running lights
- VHF radio
- Radar
- Auto Pilot
- “Loran” that’s the breaker used for my USB ports now
- Horn
- Check Anchor light is off
- The boat computer, modems, router, Maretron system, two Samsung LCD displays are all 12 volt and on a separate breaker that is not on the pilot house system. They were already on, as that system takes a few minutes to boot up, as the router can be picky.
Now, on this night, I had already taken one spring line off before I went to sleep. In hindsight, that was probably a mistake, as it got me out of my routine.

03:30 I did my engine room check. I was also out of my routine because my engine room bilge pump was off and had been for the 10 days I was on this dock. With the little leak I had from the transmission, while no significant oil would be discharged, it would still make an embarrassing oil sheen, would not be nice for Kyoko and Mike, who had so graciously given me this spot. I could easily wait until we were off-shore.
03:43 Engine start. To this day, it is unclear to me what I was thinking. But I didn’t turn on the Auto Pilot or the Radar. More likely I did, but in any case, I untied from the dock, without realizing that neither was on.
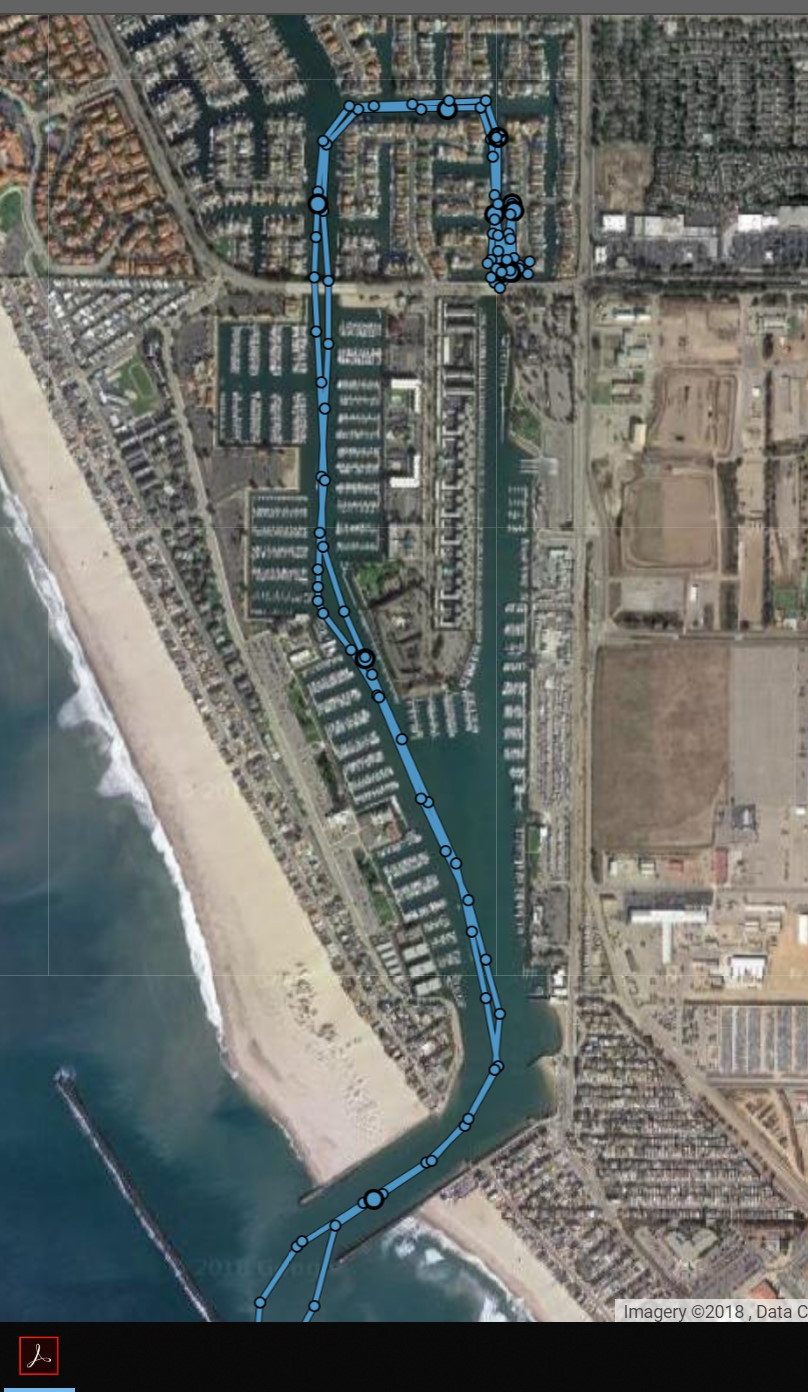
03:52 Free from the dock and underway. I make the 90° turn to starboard to clear the dock, at which point I realize the Radar is not on. It’s dark. I don’t travel without the radar in the daytime, let alone now. But what to do.
These fairways were relatively wide, maybe 150 feet, but with boats and/or docks on either side. To return to Kyoko’s dock, I would have to do a 180° to port, then a 270° to dock bow facing out, as I was. In the dark, alone, that did not appeal to me. I also did not want to dock bow in, tie on the port side, as all my lines were on the stbd side. Again, being alone, limited my options. I decided to press on and look for a convenient place to stop to be bel to diagnose and solve the electrical issue.
In hindsight, I should have turned around and docked bow in. As it turned out, where I did decide to dock had a current that was vexing. At least this was a dock I knew. But at the time, I was more concerned about hitting something and felt it would be better someplace else. There must be some fuel dock or some such on the 40 minute it would take to go thru the channels and harbor to the sea.
My abrupt stop of video and boat for that matter is because while approaching the bridge, I was sure it was the same bridge I had come under two weeks earlier. But then, it that moment of panic, I thought maybe in the dark, I had made a wrong turn. I didn’t, but that’s what being in the dark will do for you.
So, I slowed to inch under the bridge. I then proceeded to spend 15 minutes trying to back in a dock. With no current, it would have been easy, but in this case, there was a current, pushing the boat and especially the bow to port, so as I backed I’d end up almost perpendicular to the dock. After 3 or 4 attempts, I gave up and decided it would be easier to just go bow in around the corner. It was, and I did.

Just tied to midships. The boat secure, I was able to get under the helm to see why I had no power to the radar and autopilot.
Pilot house voltage has been an issue since day 1. I need to run a bigger or additional line and ground to the pilot house. When on long cruises, once the batteries are fully charged, the voltage at the batteries goes to 12.85v or thereabouts. The problem is that voltage in the pilot house is down to the low 12v. The Raymarine radar display will blink out momentarily when the voltage dips below 12. This usually happens when the auto pilot commands a longer turn. It gets annoying. So, since I never got around to running the additional wires, I instead did my normal half-assed fix of jumping from one buss to the other. The pilot house electrical panel has three separate busses. It used to be two, but sometime a couple years ago, I thought I had a fix for the radar by making a third buss. It sort of worked.
But coming north with Larry the radar display (not the transmitter or computer, only the display) started blinking again. I added another jumper. Worked great. But then upon arrival, I redid in a different way. Why? who knows!!
That different way is what was not working. I realized right away why the autopilot wasn’t getting power. So, I put it back the way it was, and all was good. That took 5 minutes. The additional docking took 45 minutes.
That delay would bite me in the ass later that afternoon. Once I got out to sea, the winds were light from the south or southwest. I was headed 280°, just north of west. Winds out of the south were good, east better. Late in the morning the winds started to turn to 280° at 06 kts, right on the nose. 3 hours later at 14:00 they were 28012 g 15 kts, pitching had increased to 12° up and down and speed was reduced by one knot.

I was able to make the turn to the NNW, 340° at 16:00. Winds had already increased to 290° 14 g 20. The turn took the winds and seas off the bow to the port forward quarter, much better than dead ahead. I was grateful for my early morning start.
The rest of the day was a piece of cake. Winds stayed 300° 15 g 20 for the rest of the evening. We were pitching and rolling, but it was tolerable. I didn’t jump overboard as I have been tempted to do when going into ahead sea.
And now you know the rest of the story.

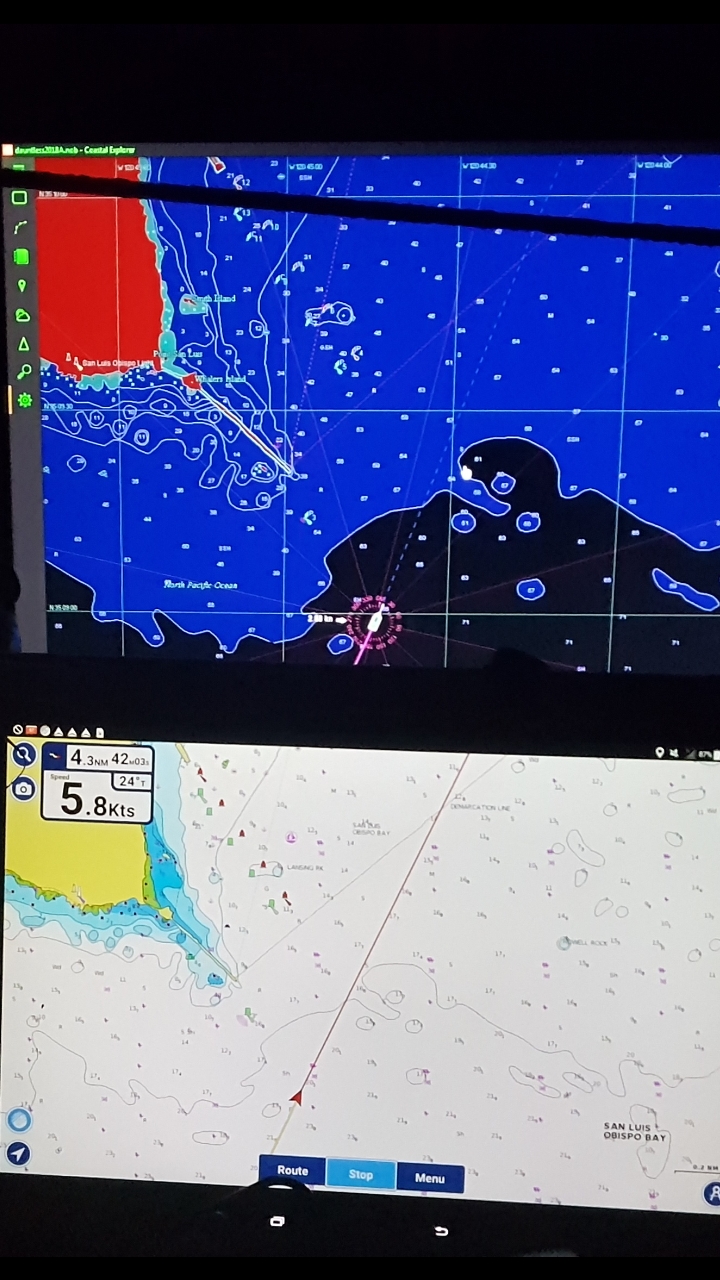
I arrived in off Avila Beach in San Luis Obispo Bay around 22:00 and anchored that night using the radar. But then you already knew that.